


What is automatic control?
Control is broadly defined as the process of managing a system's operation to achieve a specific objective.
For example, consider maintaining a constant water temperature in an aquarium for tropical fish. The water is heated by a heater, but the temperature fluctuates due to factors such as the ambient room temperature. To maintain the ideal environment, the heater's output must be constantly adjusted.
In this scenario, keeping the water temperature constant is the "objective," and adjusting the heater output is the "control action." The entire system--detecting the water temperature and adjusting the heater accordingly--is referred to as "control."
Control systems are categorized into "manual control," which relies on human intervention, and "automatic control," which operates autonomously via machinery or electronics. Common types of automatic control include sequence control, feedback control, and feedforward control.
Typical control methods:
- ●Sequence Control
-
This method executes control stages sequentially based on a predetermined order or set of conditions. A washing machine is a classic example, cycling through "wash, rinse, and spin" in a fixed order. It is ideal for processes requiring the repetition of a specific procedure.
- ●Feedback Control (FB)
-
In feedback control, sensors measure the process variable (e.g., temperature), and this current value is compared against a target setpoint. The system then adjusts the manipulated variable (output) to eliminate any difference (deviation) between the two. PID control is the most prominent form of feedback control.
- ●Feedforward Control (FF)
-
Unlike feedback control, which reacts to errors, feedforward control anticipates changes. It measures disturbances (such as a drop in ambient temperature) and adjusts the operation before the process variable is affected. While this allows for rapid response, it cannot correct for unmeasured disturbances or modeling errors. Therefore, it is often combined with feedback control to ensure accuracy.
Feedback control
Typical feedback control methods include the following.
ON/OFF control
This is the simplest form of control, switching the output fully on or off. A common example is a thermostat.
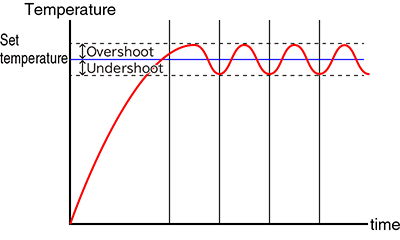
Using the aquarium heater example: the heater turns on when the water temperature is below the setpoint and turns off when it exceeds it. Since the output effectively only has two states (0% and 100%), the temperature tends to fluctuate around the setpoint. This fluctuation--rising above or falling below the target--is known as overshoot and undershoot. While simple, this method is widely used in devices like humidifiers where precise stability is not critical.
This phenomenon of going above or below the "setpoint" is called overshooting or undershooting. Because it is a very simple mechanism with only two operating volume options (0% and 100%), it is utilized in a variety of devices and locations, such as the heating mechanism of humidifiers.
Proportional control
Unlike ON/OFF control, proportional control continuously adjusts the output level in response to changes in the measured value.
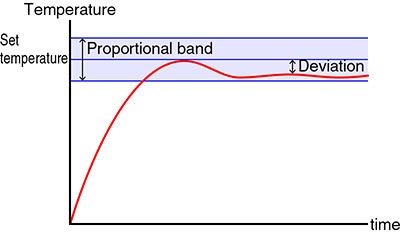
A "proportional band" is set around the target value. Within this band, the output is proportional to the deviation (error) between the current value and the setpoint. For instance, the heater might operate at 100% until the water temperature enters the proportional band. Once inside the band, the power gradually decreases--e.g., 50% at the midpoint and 0% as it reaches the upper limit.
Compared to ON/OFF control, P-control reduces overshoot and hunting. However, a key characteristic is that it often stabilizes at a point slightly different from the target value (offset).
Proportional-Integral-Derivative (PID) Control
PID control is the most widely used feedback control method in industrial automation. It combines Proportional (P), Integral (I), and Derivative (D) actions to achieve stable and precise control.
While Proportional control forms the basis, it is often insufficient on its own due to issues like offset. The Integral (I) action eliminates this offset, and the Derivative (D) action reacts to sudden changes or disturbances. By optimizing these three parameters, PID control can handle complex systems that simple ON/OFF or P-control cannot.
Three operations of PID control
We explained that PID control is based on a combination of P, I, and D operations. In this section, we will explain specifically how each of these operations works.
- • P-operation (Proportional)
-
In PID control, P operation (proportional control) is the basic operation. As described in the previous section, proportional control is control in which the deviation between the set value and the current value is proportional to the operating volume within a proportional band.
- • I-operation (Integral)
-
I operation is controlled by time integration. In P operation, the set value and the current value do not match due to load fluctuations or inherent characteristics of the equipment, and a permanent discrepancy (deviation) may occur. This is called offset (residual deviation).
Therefore, "PI" operation, which combines "P" operation with "I" operation, can be used to automatically eliminate the offset that has occurred. Using water in an aquarium as an example, PI operation is the fine-tuning of the water to achieve equilibrium at a temperature as close to the set value as possible.
The I operation adjusts the operation amount of the P operation by proportionally accumulating the offset time and the operation amount. If the integration time is short, strong integration will be applied, and the deviation can be corrected in a short time, but hunting, a phenomenon where the current value fluctuates around the set value is likely to occur.
Therefore, the point of control is to set the integration time appropriately.
- • D-operation (Derivative)
-
D-operation is a control to respond to sudden changes due to disturbances, etc., and to correct the output. Based on the example of an aquarium, even if the water temperature is stable once, it will change due to external factors such as a sudden rise or fall in the outside air temperature.
In such a case, the P operation adjusts the output value in proportion to the deviation between the current value and the target value, whereas the PD operation plus the D operation adjusts the output value in proportion to the speed of temperature change. As soon as a trend in temperature change is detected, the corresponding control is performed, shortening the time required for stabilization at the original value.
PID Control Performance Metrics
To objectively determine if the results of PID parameter tuning are "good" or "bad," the following metrics are used.
Rise Time: The time it takes for the controlled variable to reach a specific range of the target value (e.g., 10% to 90%). This indicates the speed of the response.
Overshoot: The amount by which the controlled variable exceeds the target value. If this is large, it can put a strain on the system.
Settling Time: The time it takes for the controlled variable to converge and stabilize within a certain range (e.g., ±5%) of the target value after an overshoot.
Offset / Residual Deviation: The persistent difference between the target value and the actual process variable in steady-state.
Excellent tuning means balancing these metrics according to the requirements of the system being controlled.
Adjusting PID Parameters (Tuning)
To make PID control function effectively, it is essential to optimize (tune) the "PID parameters," which determine the strength of the P, I, and D actions, to match the controlled object.
Hunting: A phenomenon where the controlled variable continues to oscillate around the target value when parameters are inappropriate.
Typical Tuning Methods: In addition to manual adjustment based on experience, there are methods that use formulas, such as the Ziegler-Nichols method and its improved version, the CHR method.
Auto-tuning: Recent temperature controllers are equipped with an "auto-tuning function" that automatically calculates the optimal PID parameters at the touch of a button. Internally, this function executes a tuning method programmatically, such as the limit sensitivity method.
Implementation and Application of PID Control
Advanced Forms of PID: Basic PID control has challenges, such as output disturbances when the setpoint changes abruptly. To address this, improved versions have been devised, such as PI-D control (where the derivative action is applied to the process variable instead of the error) and I-PD control (where proportional and derivative actions are on the process variable).
Anti-Windup: The manipulated variable has physical limits (e.g., a valve can only be 0% to 100% open). If a large error persists, the integral term can accumulate excessively, causing the output to become stuck at its limit. This is known as "windup." An "anti-windup" process to prevent this is an essential implementation technique for reliable control.
Program Implementation: When implementing PID control on a computer, the process involves repeatedly calculating the error at short time intervals (the control period) and outputting the sum of the P, I, and D terms as the manipulated variable.
Typical Applications of PID Control
PID control is utilized in a wide range of industries, including semiconductor manufacturing, chemical processing, and robotics. It is particularly effective for systems subject to frequent disturbances or those requiring precise adherence to changing setpoints, such as electric furnaces.
A prominent modern application is the thermal cycler used for Polymerase Chain Reaction (PCR). In PCR, the temperature of the DNA reaction solution must be rapidly and precisely cycled through specific steps to replicate DNA fragments. PID control is essential here to ensure the temperature transitions quickly and stabilizes accurately at each stage, maximizing reaction efficiency.